




Personnaliséiert automatesch Luede Plattform fir Schmierölfässer
Produit Attributer
| Verpackungsmaterial Form: PE Quadrat Eemer |
| Mark: Sunrise Intelligent Equipment |
| Benotzerdefinéiert: Jo |
| Transport Package: hëlzent Fall |
| Applikatioun: Schmierölfässer |
Produit Label
Personnaliséierten System, Schmierölfässer, Sortéierungs- a Füttersystem, Automatesch Plattform, Füllmaschinn, Verpackungsmaschinn, Verpackungsmaschinn, Schmierölproduktiounslinn, personaliséiert Maschinn, Entschraubungsmaschinn, Schmieröl.
Produit Detailer
Equipement Aféierung
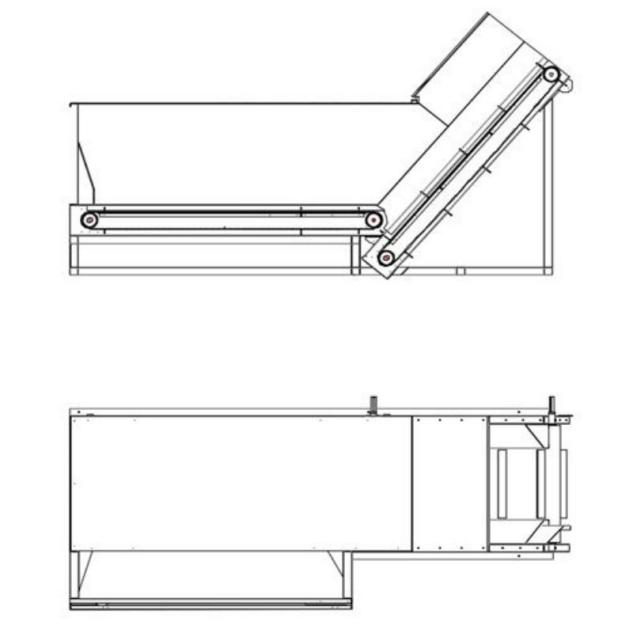
1. Eemer Lift Gürtel Apparat:
D'Zwee-Etapp Gürteltransporter hieft d'Uelegfässer op eng gewëssen Héicht a schéckt se op den Differentialfläschhandhaber.D'Héicht vum Gürtelbaffle ass manner wéi d'Halschent vun der Dicke vun den Uelegfässer, wat fir d'Erhiewung vun den Eenzelschicht Uelegfässer an d'natierlech Rolling vun den Uelegfässer stack ass.

2.Differential Fläsch Ëmgank:
D'Differenziell Geschwindegkeet vun der Multi-Sektioun Vermëttelung gëtt ugeholl fir d'Veraarbechtung an d'Vermëttele vum Schmierölfaass ze realiséieren.D'Vermëttlungsbreet vum Inlet vum Fasstransportdeel erlaabt zwee Fässer gläichzäiteg duerch ze goen, wat de Risiko vun der géigesäiteger Extrusioun vum Faass reduzéiert an d'Operatiounsstabilitéit vun der Ausrüstung verbessert.Multi-Etapp Fërderband Schrëtt-fir-Schrëtt Verknëppungskontrolle fir d'Distanz vum Faass unzepassen.

3. Visuell Positionéierungserkennungssystem:
Installéiert an der Grëff Conveyor Inlet Sektioun.De visuelle Positionéierungssystem wäert Fotoen huelen fir de Formzoustand vun den geliwwert Uelegfässer ze lokaliséieren an z'entdecken, Dateninformatioun ze bilden an no der Analyse un de Robotersystem ze schécken.D'Zuel, d'Positioun an d'Orientéierung vun den Uelegfässer, déi vun der Inspektiounssäit passéiert sinn, ginn un de Controller geschéckt, an de Controller schéckt entspriechend Gripbefehl un déi zwee Spannhandroboter no de kritt Signaler.
4. Fläsch Handhabung Spann Hand Roboter:
No der Informatioun vun den Uelegfässer, déi vum visuellen Detektiounssystem geschéckt ginn, gëtt d'Gräifpositioun automatesch ugepasst fir d'Uelegfässer ze begräifen, an d'Uelegfässer ginn ënner der Handlung vun der fënnefter Achs ëmgedréit, an d'Uelegfässer sinn oprecht. an d'Hand op de Fërderband fixéiert.Déi zwee Spannroboter ginn automatesch Grëfftaufen zougewisen no der Zuel a Geschwindegkeet vun geliwwert Uelegfässer.
5. Erhuelung Apparat:
Seng Haaptfunktioun ass Uelegfässer mat ongülteg Grëff ze sammelen an Akkumulation a Schued vun Uelegfässer mat ongülteg Gräifen ënner speziellen Ëmstänn ze vermeiden.
6. De Fasstransportgerät mécht d'Verbindung an d'Iwwergank tëscht dem Fërderband vun all Sektioun an dem Fërdergürtel vun der Füllmaschinn gutt, ouni de Phänomen vun der Fass ze klappen, d'Fass ze drécken an de Fass ëmgedréint.

